
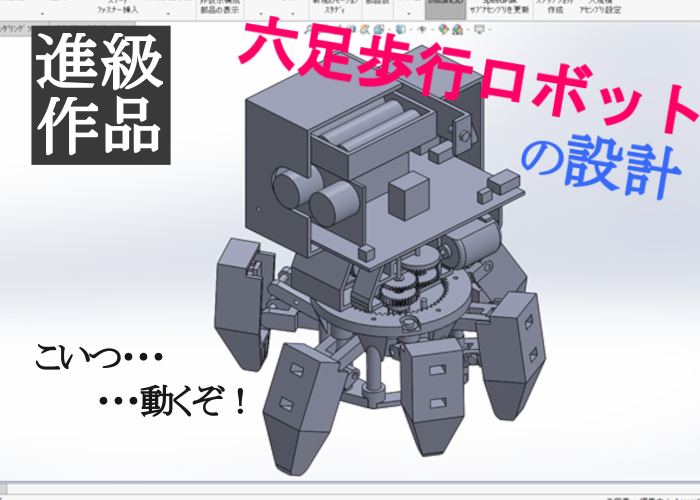
機械設計科の卒業制作では学生ごとに様々な卒業制作にとりかかっています。
そのうち1名は、市販されている組立式六足歩行ロボットのパーツをモデリングしながら構造を理解し
新たな六足歩行ロボットの設計製作中です。
歯車以外のパーツを3Dプリンタで出力することを前提とした形状に再設計しています。
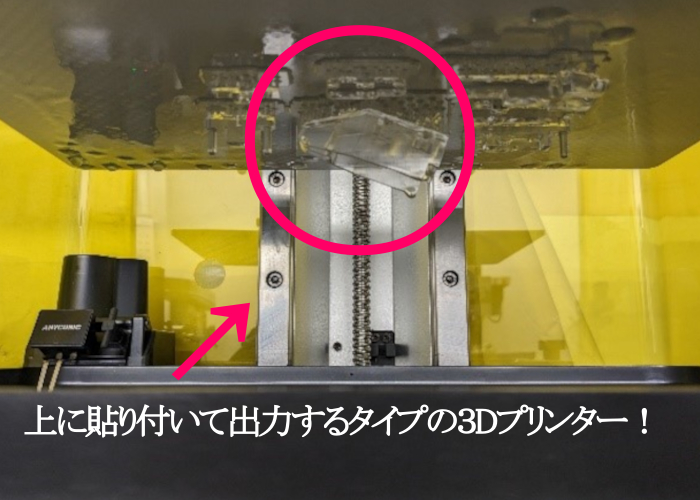
まずは、足1本分を3Dプリンタで出力してプリンタの出力精度とモデリングデータの寸法調整を行います。
3Dプリンタのテーブルから出力した部品を取り外し、洗浄機で余分なレジンを落とし、UV硬化機で部品を更に硬化させ組み立てると次の写真のようになりました。
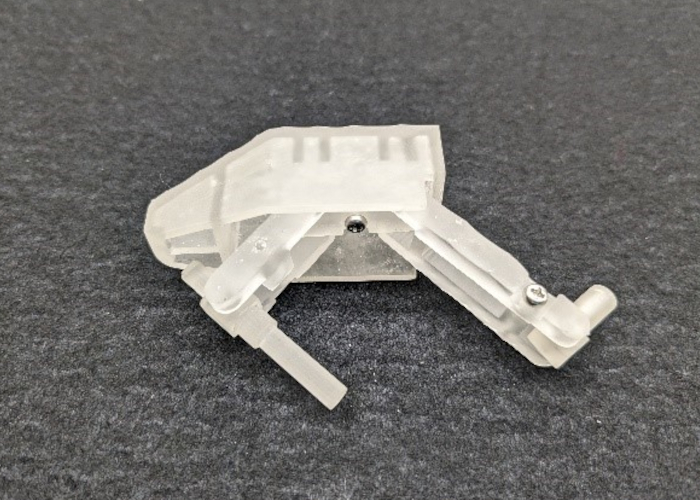
出力部品の寸法は3DCADデータとほぼ同じ寸法で出力されていたことが確認できました。
次回、残りの足(5本分)とそれに関連する部品を出力して調整していきます。

Instagramはじめました。
ぜひフォローをよろしくお願いいたします。

